
Il termine riabilitazione fa riferimento a procedure cliniche tese al progressivo ripristino di funzioni perdute da un essere umano. Ogni procedura di questo tipo deve essere efficace, efficiente, personalizzata, conforme agli obiettivi clinici e coinvolgente per il paziente: ottimizzata in termini sia di risorse da investire sia di esigenze di ciascun paziente, impegnando quest’ultimo nello svolgimento degli esercizi previsti, sempre nel rispetto dei protocolli medici.
Per giungere a tali condizioni, le tecnologie interattive offrono ogni anno nuove soluzioni sempre più versatili ed impattanti, anche potenziandosi a vicenda.
In linea con queste prospettive, analizzeremo di seguito gli scenari relativi alla possibilità di un uso sinergico di soluzioni robotiche e virtuali/aumentate in applicazioni per la riabilitazione motoria e neuromotoria.
Indice degli argomenti
Tecnologie riabilitative sinergiche
Una recente collezione di articoli scientifici della rivista “Frontiers in Robotics & AI” – curata da un gruppo di esperti che include chi scrive insieme a Claudio Castellini, Ana Lúcia Faria, Marta Matamala-Gomez, Edward Grant, Philippe Archambault, Thomas Platz, Giampaolo Brichetto – si è focalizzata sulla possibilità di stabilire sinergie proficue tra sistemi robotici e digitali (riferendosi, con quest’ultimo termine, a tutte le soluzioni relative ad analisi e visualizzazione di informazioni clinicamente utili, anche entro contesti virtuali) per la riabilitazione.
In tale contesto, macchine intelligenti ed ambienti interattivi possono infatti esprimere il loro pieno potenziale riabilitativo integrandosi in innovazioni che permettono di coinvolgere l’utente sia fisicamente che mentalmente in compiti atti al recupero funzionale.
Robot biomedici e riabilitazione: i contesti applicativi
Pensiamo, ad esempio, a sistemi robotici (come gli esoscheletri, dei quali abbiamo discusso in questo precedente approfondimento) che possono assistere procedure di riabilitazione fisica adattate ai dati motori e fisiologici del paziente raccolti da sensori indossabili, mobili e ambientali anche durante le attività della vita quotidiana.
Queste soluzioni possono agire come nodi di una rete di piattaforme sanitarie digitali nel quadro di framework di Connected Health, consentendo contemporaneamente programmi riabilitativi ubiqui e personalizzati in congiunzione a processi computazionali diagnostico-prognostici.
Gli stessi robot biomedici possono però sfruttare anche ambienti di realtà estesa coinvolgenti – arricchiti anche da soluzioni videoludiche – per motivare i pazienti durante gli esercizi.
Questo approccio può essere utilizzato anche in procedure di tipo riabilitativo per allenare gli utenti di dispositivi assistivi e protesi bioniche. Inoltre, è opportuno riflettere anche sulla progettazione di sistemi fruibili nel quadro delle cure domiciliari per persone fragili, come discusso durante l’evento wudSIE 2021 indetto dalla Società Italiana di Ergonomia in occasione del World Usability Day dello scorso anno.
Ruolo dell’AI e sinergie tecnologiche
I sistemi di teleriabilitazione possono adottare le soluzioni elencate per favorire il recupero funzionale e favorire il benessere di pazienti a casa propria, secondo una logica di personalizzazione e decentralizzazione dei servizi di healthcare senza, per di più, alcun contatto fisico con i medici, requisito fondamentale in situazioni di emergenza come la recente pandemia di COVID-19.
In tali domini, l’Intelligenza Artificiale gioca un ruolo chiave nella gestione dei dati che permettono di abilitare le funzionalità adattive dei sistemi interattivi robotico-digitali e potenziarne gli approcci sinergici. Ad esempio, sistemi intelligenti possono rendere un robot una vera e propria macchina teranostica (neologismo che fa riferimento al fatto di poter offrire contemporaneamente funzioni sia terapeutiche che diagnostiche) grazie alla loro capacità di raccogliere e analizzare dati eterogenei per valutare l’esito della riabilitazione ed offrire nuovi spunti di indagine su condizioni individuali e metodologie terapeutiche mentre guidano la persona in procedure di training e re-training che possono comunque essere altamente onerose per un paziente.
Gli esempi descritti mostrano, quindi, il valore delle sinergie tra diverse soluzioni tecnologiche – alcune a livello fisico, altre a livello digitale – al fine di facilitare il recupero funzionale di una persona.
Ovviamente, ogni tecnologia in questione gioca il proprio ruolo in tale contesto. È quindi opportuno definirne brevemente le caratteristiche precipue.
La Robotica per la Riabilitazione
Un capitolo (del quale chi scrive è coautore) di un libro – Internet of Things for Human-Centered Design – pubblicato nel 2022 ha discusso le caratteristiche principali di robot per la riabilitazione motoria e neuromotoria (l’ambito su cui si focalizza l’approfondimento che state leggendo).
Questi sistemi mirano ad aiutare il paziente in procedure riabilitative in modo che le azioni svolte, per quanto ripetitive, siano accurate e personalizzate in base ai dati raccolti sulla persona. In particolare, i robot per la neuroriabilitazione fanno anche parte della classe delle neurotecnologie, dato che assistono esercizi che influiscono sul sistema nervoso del paziente per ripristinarne le funzioni in modo interattivo, secondo l’elaborazione in tempo reale dei dati motori e fisiologici raccolti, sempre in accordo con protocolli di allenamento basati su principi neurali (come quello della plasticità).
Gli esoscheletri, robot indossabili
Più in generale, possiamo innanzitutto classificare i robot riabilitativi come esoscheletri o end-effector (la scelta di un tipo di dispositivo dipende ovviamente dalle necessità del paziente in base all’inquadramento clinico).
In quanto robot indossabili, gli esoscheletri (e le exosuit, “esotute”) sono progettati per associare e allineare i propri giunti con il corpo del paziente (a livello degli arti superiori o inferiori come pure del tronco) per influenzarne postura e movimenti attraverso il controllo della posizione e dell’orientamento di ciascuna articolazione.
Twin, l’esoscheletro per gli arti inferiori
Un dispositivo di questo tipo è Twin, esoscheletro sviluppato e testato dal Rehab Technologies Lab guidato da Lorenzo De Michieli presso l’Istituto Italiano di Tecnologia (IIT) di Genova in collaborazione con due centri INAIL: il Centro Protesi di Vigorso di Budrio – nello specifico il team di Emanuele Gruppioni – e il Centro di Riabilitazione Motoria di Volterra – specificamente, il team di Elisa Taglione.
Twin è un esoscheletro per gli arti inferiori: come descritto in un articolo pubblicato su Frontiers sul processo di user-centered design che ha portato alla sua attuale configurazione – articolo del quale chi scrive è coautore – tale esoscheletro mira a permettere a pazienti colpiti, ad esempio, da lesioni del midollo spinale, di camminare in modo indipendente a livello sia assistivo che riabilitativo.

L’esoscheletro Twin sviluppato e testato dal Rehab Technologies Lab
Il sistema è progettato per fornire anche feedback sullo stato di salute del paziente, monitorandone i principali parametri fisiologici, producendo report specifici sull’outcome terapeutico (secondo una logica affine agli approcci di Digital Health e Digital Therapeutics) per adattare il proprio funzionamento in base alle indicazioni dei clinici (anche a livello di ergonomia e sicurezza).

Wristbot: il dispositivo robotico medico nato presso l’IIT
Gli end-effector sono invece costituiti da dispositivi robotici progettati per vincolare meccanicamente una parte distale del corpo umano (ad esempio, una mano) affinché segua il movimento del robot. Ne è un esempio Wristbot, dispositivo robotico medico (molto simile ad un joystick che misura i movimenti e la forza del polso mentre può generare forze che assistono il paziente durante la riabilitazione del distretto in questione) nato presso l’Istituto Italiano di Tecnologia e attualmente sviluppato dalla startup ReWing guidata da Jacopo Zenzeri.
Da sottolineare il fatto che Wristbot sia stato progettato per rendere gli esercizi previsti coinvolgenti mediante strategie videoludiche come quella dei serious game (giochi realizzati per scopi legati non solo all’intrattenimento) e della gamification.
Tale distinzione diventa sempre meno netta man mano che i vantaggi delle feature videoludiche vengono confermati in diversi contesti professionali.

Il riferimento alle strategie videoludiche come mezzo per potenziare gli effetti dei sistemi robotici per la riabilitazione (anche solo coinvolgendo gli utenti) non è certamente casuale e apre la tematica degli ambienti interattivi in questo contesto.
I vantaggi della Virtualità per la Riabilitazione
I lavori del recente congresso sulle tecnologie per la riabilitazione RehabWeek 2022 a Rotterdam hanno messo in evidenza l’importanza del coinvolgimento dei pazienti nelle attività da svolgere.
I robot riabilitativi possono certamente effettuare procedure ripetitive in modo accurato e personalizzato per esercitare le capacità della persona nel controllo motorio, ma questo non significa che non possano comportare un carico di lavoro eccessivo a livello mentale.
Per superare ostacoli di questo tipo, in contesti riabilitativi sia tradizionali che assistiti da robot, le soluzioni che di anno in anno emergono nel continuum tra realtà e virtualità possono certamente esser d’aiuto, soprattutto quando si intrecciano con approcci videoludici – serious game e gamification – ai quali si è già fatto riferimento – per la loro capacità di sostenere il coinvolgimento e la motivazione della persona.
In generale, possiamo dire che sistemi di realtà virtuale (in cui l’ambiente esperito dal paziente è interamente modellato dal computer), realtà aumentata (in cui oggetti virtuali sono sovraimposti ad ambienti reali), virtualità aumentata (in cui ad un ambiente virtuale si aggiungono viste su oggetti reali) e realtà mista (termine che originariamente faceva riferimento a tutti i casi in cui oggetti reali e virtuali coesistono nella scena percepita dall’utente, mentre i trend attuali aggiungono requisiti come la possibilità di interagire con gli elementi digitali come se fossero oggetti fisici), sono considerati casi di realtà estesa (termine che definisce tutte le modalità con cui reale e virtuale possono combinarsi ed integrarsi).
La versatilità di queste tecnologie (supportate da sistemi di visualizzazioni basati su visori o proiettori, come pure su semplici schermi in caso di condizioni non immersive) nel fornire feedback multimodali e scenari con compiti coinvolgenti in contesti riabilitativi permette di creare veri e propri ambienti ad elevata validità ecologica (somiglianza con contesti reali), in modo da dare significato e profondità alle azioni che il paziente deve svolgere ripetutamente.
Reh@City v2.0: scenari videoludici ispirati alla vita quotidiana
Un esempio dell’approccio appena descritto è il progetto Reh@City v2.0, ideato dal NeuroRehabLab dell’Università di Madeira (Portogallo). Il sistema in questione è basato su scenari videoludici ispirati ad attività della vita quotidiana.
Ana Lucia Faria, ricercatrice e docente di NeuroRehabLab, ha messo in evidenza – durante RehabWeek 2022 – il vantaggio di realizzare exergame (serious game progettati per stimolare l’esercizio) che siano ispirati ad attività culturalmente specifiche del contesto dei pazienti, soprattutto nel caso di persone anziane, citando, ad esempio, sistemi atti a promuovere l’esecuzione di esercizi motori e cardiovascolari ispirati ad attività specifiche di Madeira (si va dalla pigiatura virtuale dell’uva alla corsa in cesti di vimini, dalla navigazione su barche tradizionali al canto del Fado).
Va sottolineato che gli ambienti interattivi riabilitativi sviluppati da team come quello di NeuroRehabLab puntano al recupero sia cognitivo che motorio: non va, infatti, dimenticato che la versatilità dei sistemi di realtà virtuale/aumentata/mista si esprime anche nel far esercitare determinate funzioni cognitive della persona (come l’attenzione visuospaziale) grazie ad un design informato a livello delle ultime scoperte in psicologia e neuroscienze cognitive.
La riabilitazione fisica in realtà mista
Un punto interessante di quanto appena analizzato è stato anche quello della possibilità di integrare gli scenari descritti con sistemi robotici capaci di fornire “fisicità” alle interazioni previste nei protocolli.
Sempre durante RehabWeek 2022, un lavoro di Anna Bucchieri et al. (Rehab Technologies Lab di IIT e NEAR Lab del Politecnico di Milano), dal titolo “Design of a Mixed Reality Environment for the extrapolation of Reference Trajectories in Upper-Limb Rehabilitation” (lavoro del quale chi scrive è coautore) presentato a ISVR (International Society for Virtual Rehabilitation) ha mostrato, ad esempio, un ambiente per la riabilitazione fisica in realtà mista ideato per essere compatibile – con una prossima integrazione – con il robot Float (che chi scrive ha presentato anche nel già citato approfondimento riguardante il tema della robotica indossabile, qui su Healthtech360).
Quest’esempio, basato sull’opportunità di motivare il paziente nell’eseguire attività ripetitive, dimostra la direzione che la ricerca tecnologica sta prendendo per stabilire sinergie tra sistemi di realtà estesa e dispositivi robotici, gettando le basi per imminenti nuove convergenze.

Convergenze e Phygital Rehabilitation
Va detto che diversi sistemi robotici per la riabilitazione presentano già integrazioni con ambienti interattivi, sia per motivare i pazienti sia per arricchire gli scenari neuroriabilitativi di stimolazioni a livello di specifiche funzioni motorie e cognitive.
Ma le convergenze tra queste soluzioni (e altre come le neurointerfacce e i sistemi di neuromodulazione) non possono dirsi certamente pienamente esplorate: non possiamo, infatti, considerare esaurita questa vena, soprattutto ponderando le critiche all’efficacia terapeutica di sistemi videoludici, spesso a rischio di semplificazioni che fanno passare per gioco qualsiasi sistema interattivo (come discusso in un recente capitolo sui videogame per persone anziane di cui chi scrive è coautore) senza che ne sia stata portata avanti una progettazione che miri all’engagement della persona e di suoi specifici processi motori e cognitivi.
Va sottolineato che (senza assumere che un ambiente interattivo debba necessariamente essere un videogioco), in mancanza di tali aspetti, si perde il vantaggio dell’uso di stimoli e contesti virtuali, la cui malleabilità può teoricamente fornire al paziente qualsiasi esperienza possibile: quindi, perché non renderla interessante?
Una critica può derivare dal fatto che possono esser inserite potenziali fonti di “disturbo” (un’osservazione frequente in contesti laboratoristici di ricerca in relazione al fatto che il controllo sperimentale possa esser ridotto se le stimolazioni sono troppo ricche ed eterogenee).
Occorre però sottolineare che rendere significativa (possibilmente in termini di validità ecologica) l’attività da svolgere offre vantaggi che includono un’esecuzione più accurata degli esercizi nel tempo che porta ad una ricca mole di dati (anche in ottica omics a livello diagnostico-prognostico) che può essere informativa sia per un sistema robotico e/o digitale per personalizzare la propria attività sia per il clinico o il ricercatore, che può determinare gli stimoli che la persona esperirà in modo da controllarne gli effetti senza inquinare l’interpretazione dei risultati.
Il progetto ENACT di IIT e AISM
Proprio riflettendo sulle necessità appena descritte, appare chiaro come le convergenze tecnologiche richiedano multidisciplinarità per cogliere diversi aspetti dell’attività e dell’esperienza dell’utente.
Ne è un esempio il progetto ENACT – Employing Neuroergonomic solutions to Attenuate the Cerebellar Tremor – del quale chi scrive è il Principal Investigator – nato dalla collaborazione tra IIT e AISM (Associazione Italiana Sclerosi Multipla) nel quadro dei programmi speciali FISM (Fondazione Italiana Sclerosi Multipla) con il supporto del team di Giampaolo Brichetto, Direttore Clinico presso AISM e FISM e Vice-Presidente del network internazionale RIMS (Rehabilitation in Multiple Sclerosis).
Tra gli scopi del progetto – che mira all’indagine del Tremore Cerebellare di persone con Sclerosi Multipla per realizzare soluzioni interattive capaci di mitigarlo – si può notare il co-design (seguito da sviluppo e test) di sistemi di realtà virtuale e mista per la riabilitazione motoria e cognitiva di diverse funzioni delle persone con Sclerosi Multipla, anche in integrazione con dispositivi di tipo meccatronico.
Sostanzialmente, lo sviluppo di scenari per l’indagine del Tremore Cerebellare diventa l’occasione per realizzare soluzioni per molteplici altre criticità dei pazienti.
Robotica e Intelligenza Artificiale: il progetto RAISE
L’attività appena descritta viene svolta anche grazie all’esperienza di AISM nell’utilizzare soluzioni videoludiche in contesti riabilitativi e nel guidare la progettazione di sistemi interattivi ad alto impatto clinico.
Le soluzioni ideate mirano ad integrare anche sistemi robotici per la riabilitazione nel quadro di progettualità più ampie, legate ad esempio al progetto RAISE finanziato in Liguria dal PNRR con il coinvolgimento di attori come IIT, Università di Genova , CNR nell’area ligure.
L’acronimo stesso del progetto RAISE – il cui significato è “Robotics and AI for Socio-economic Empowerment” – fa riferimento a sinergie tra diversi tipi di tecnologie, come ad esempio quelle dei Digital Twin (repliche digitali in tempo reale di sistemi fisici, modificati direttamente o indirettamente dalle predizioni effettuate tramite le loro copie virtuali).
I Digital Twin sono una delle tematiche dello Spoke 2 (dedicato alle tecnologie per la salute) di RAISE, insieme all’utilizzo sinergico di robot riabilitativi e ambienti interattivi sia fisici che digitali e ibridi (come nel caso delle applicazioni di Internet of Things per la domotica).
Dal Digital Twin al Phygital Twin
Riflettendo sulla virtualità caratterizzante i Digital Twin (che un esperto deve poter gestire e modificare per osservare quale effetto possono avere determinati interventi sulla sua controparte fisica), un recente articolo pubblicato su Frontiers – del quale chi scrive è il primo autore – ha proposto la possibilità di implementare (ove possibile) dei “Phygital Twin”: invece di replicare in modo puramente digitale un sistema, alcune componenti di quest’ultimo possono esserlo a livello fisico, ad esempio utilizzando i medesimi oggetti presenti nel sistema replicato.
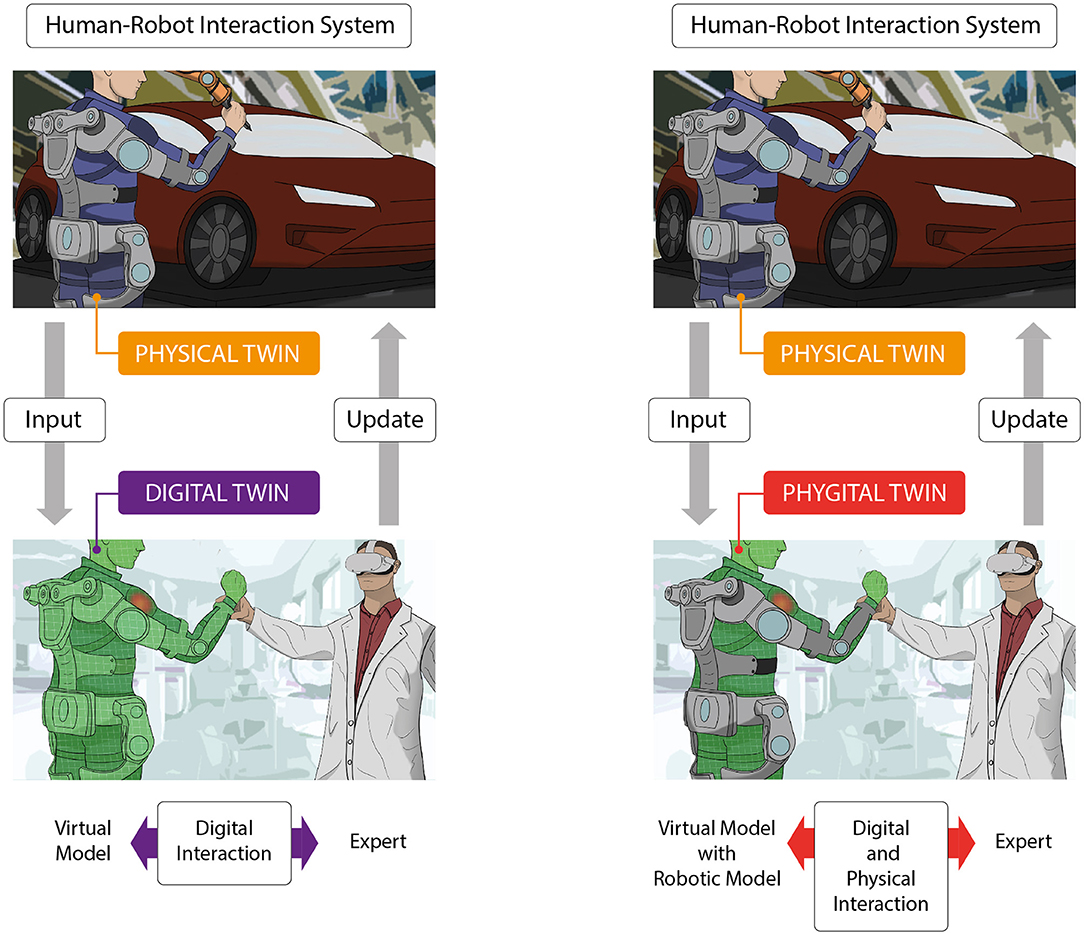
Nell’articolo si fa riferimento, a titolo esemplare, alla possibilità di simulare un sistema uomo-esoscheletro mediante un simulacro che rappresenta a livello digitale la componente umana (visualizzandola mediante un caschetto per realtà virtuale o mista) e a livello fisico la componente robotica tramite il medesimo esoscheletro utilizzato nel sistema simulato.
Questo tipo di approccio mira a facilitare la manipolazione del twin per valutarne gli effetti in termini simulativi e predittivi mediante una componente fisica che può essere gestita in modo intuitivo dall’esperto, anche con una maggiore affidabilità rispetto ad una sua replica virtuale.
Tale scenario può certamente declinarsi in contesti riabilitativi, specialmente tele-riabilitativi, in cui il terapeuta può gestire il twin del sistema paziente-robot sfruttando l’opportunità di percepirne a livello tattile le componenti meccatroniche.
Robotica e Telemedicina in logica twinning e virtuale
Un setup che, puntando esplicitamente alla logica del twinning, può fungere da base per questo tipo di approccio è quello descritto in un recente articolo di Mario Tröbinger et al. (Munich Institute of Robotics and Machine Intelligence) su un sistema di interazione aptica capace di realizzare a distanza anche attività di tipo diagnostico mediante un sistema robotico.
L’approccio descritto nell’articolo è sicuramente compatibile con la progettazione di sistemi di telemedicina che si prestino ad una digitalizzazione non solo a livello di processo di twinning ma, anche, in termini di arricchimento delle interfacce utente mediante stimoli virtuali.
Un potenziale metaverso per la riabilitazione?
I possibili approcci sinergici tra sistemi fisici di interazione uomo-robot e sistemi digitali visualizzati a livello virtuale richiedono, infine, una riflessione che deve partire dal termine “phygital” appena usato.
Questo neologismo fa esattamente riferimento alla sinergia tra elementi fisici e digitali, rendendo oggetti e ambienti di fatto “programmabili” – come suggerito da Andrea Gaggioli dell’Università Cattolica del Sacro Cuore di Milano in questo articolo – e parte di un flusso esperienziale a cavallo tra la dimensione reale e una dimensione virtuale.
Si può pensare, di fatto, a questo approccio come uno dei pilastri che permetteranno lo sviluppo di futuri metaversi (il plurale è voluto!) in cui realtà e virtualità possono combinarsi in modo ancor più impattante grazie alla presenza di sistemi robotici capaci di fornire fisicità al digitale a beneficio di pazienti e clinici.
Tutto ciò potrà avvenire a patto che i soggetti appena indicati vengano coinvolti nel co-design delle innovazioni a venire con il contributo di professionisti capaci di non limitarsi all’implementazione di sistemi basati sui protocolli terapeutici ma abili nello studio dell’ergonomia di tali sistemi sia a livello sia fisico che cognitivo e organizzativo, in modo che gli utenti e loro funzioni vengano davvero coinvolte nelle attività riabilitative, eseguendole con stabile (e, si spera, crescente) accuratezza nel tempo.
Una “phygital rehabilitation” può diventare il paradigma intorno al quale strutturare sinergie robotico-virtuali che fungano da base per un vero e proprio “metaverso riabilitativo” (che superi le distanze tra pazienti, clinici e, possibilmente, ricercatori, progettisti e sviluppatori) da cui emergano esperienze coinvolgenti per gli utenti e digital e phygital (derivanti dall’attività dei sistemi interattivi sia digitali che fisici, in questo caso meccatronici) biomarker che offrano nuovi strumenti all’ambito della medicina di precisione.
Il futuro della Robotica a FORUM Sanità 2023

Dello stato dell’arte, prospettive e frontiere della Robotica in Sanità si parlerà anche a FORUM Sanità 2023, in particolare durante gli HealthTech360 – Digital360 Coffee Talk, spazi di condivisione della conoscenza e confronto sui temi dell’innovazione in Sanità che si terranno a Roma nei pomeriggi del 25 e 26 Ottobre, all’interno di FORUM Sanità 2023, evento del quale HealthTech360 è storicamente partner.
Come i nostri lettori sanno bene, la mission di Healthtech360 è promuovere la trasformazione digitale della Sanità e comunicare la cultura della salute digitale attraverso un progetto editoriale di divulgazione scientifica che si rivolge agli stakeholder e a tutti gli attori hi-tech del “sistema salute”: imprese e startup, CEO, top manager, decision maker, innovation manager, professionisti, medici e operatori sanitari che vogliano accrescere la propria conoscenza e consapevolezza sui vantaggi, le opportunità di business e le prospettive offerte dalle tecnologie applicate alla Salute.
Obiettivo: fare sistema per comunicare e rappresentare al meglio l’ecosistema della salute digitale attivando la grande conversazione sui modelli sociali ed economici ispirati alla sostenibilità della sanità digitale e delle tecnologie emergenti.
HealthTech360 – in quanto hub di condivisione della conoscenza sulle tecnologie e l’innovazione in Sanità – si avvale della collaborazione di esperti di settore nel mondo accademico, istituzionale e della industry. Idee e persone capaci di guardare al futuro con una vision che spinge innovazione e tecnologia verso il loro ideale più nobile: la salute e il benessere dell’umanità.
Tra questi, Giacinto Barresi – Ricercatore dell’Istituto Italiano di Tecnologia (IIT) – che – proprio ai Coffee Talk di HealthTech360 – moderati da Massimo Mattone, direttore HealthTech360 – si confronterà davanti a un buon caffè con i suddetti esperti e future thinker – che fanno parte delle firme abituali di HealthTech360 – illustrando le ultime frontiere e tendenze della Robotica in Sanità tra Realtà Aumentata, Metaverso e Intelligenza Artificiale.




